キーワード検索に1,065件のヒットがありました。
生産終了製品のご案内にもヒットしています。詳細はこちらをクリックしてください。
大型真空ユニット ZR
真空用機器 » 真空エジェクタ・真空ポンプシステム
-
・エジェクタシステム/真空ポンプシステムに対応。
・モジュール設計による必要機能・組合せが可能。
・ダブルソレノイドによる自己保持機能。
・マニホールド化可能。
・デジタル真空スイッチ、電磁弁等の機能の選定が可能。
| シリーズ | ノズル径 (mm) | 最大吸込流量 [L/min(ANR)] | 空気消費量 [L/min(ANR)] | 適用パッド目安 (mm) | 真空ポンプシステムシリーズ |
|---|---|---|---|---|---|
| ZR110 | 1.0 | 25 | 53 | 2~32 | ZR100 |
| ZR113 | 1.3 | 42 | 86 | 2~50 | ZR100 |
| ZR115 | 1.5 | 63 | 102 | 2~100 | ZR100 |
| ZR118 | 1.8 | 74 | 155 | 2~125 | ZR100 |
| ZR120 | 2.0 | 95 | 194 | 2~150 | ZR100 |
電動アクチュエータ/ロッドタイプ LEY
電動アクチュエータ/電動シリンダ » モータレス仕様
-
・モータレス仕様追加でさまざまなサーボモータの搭載が可能
・対応モータ
三菱電機(株)、(株)安川電機、山洋電気(株)、オムロン(株)、パナソニック(株)、ファナック(株)、ニデックインスツルメンツ(株)、(株)キーエンス、富士電機(株)、ミネベアミツミ(株)、シナノケンシ(株)、オリエンタルモーター(株)、FASTECH Co.,Ltd.、Rockwell Automation, Inc. (Allen-Bradley)、Beckhoff Automation GmbH、Siemens AG、Delta Electronics, Inc.、ANCA Motion
| 仕様 | シリーズ | ストローク (mm) | 押当て推力 (N) | 速度 (mm/s) | ねじリード (mm) |
|---|---|---|---|---|---|
| モータレス 折返し | LEY25 | 30~400 | MAX.485 | MAX.900 | 3, 6, 12 |
| モータレス ストレート | LEY25D | 30~400 | MAX.485 | MAX.900 | 3, 6, 12 |
| モータレス 折返し | LEY32 | 30~500 | MAX.588 | MAX.1200 | 4, 8, 16 |
| モータレス ストレート | LEY32D | 30~500 | MAX.736 | MAX.1000 | 4, 8, 16 |
| モータレス 折返し | LEY63 | 50~800 | MAX.3343 | MAX.1000 | 5, 10, 20 |
| モータレス ストレート | LEY63D | 50~800 | MAX.1910 | MAX.1000 | 5, 10, 20 |
| モータレス 折返し | LEY100 | 100~1000 | MAX.12000 | MAX.500 | 10 |
| モータレス ストレート | LEY100D | 100~1000 | MAX.12000 | MAX.500 | 10 |
プログラムレスコントローラ(ストローク学習機能付) LECP2
電動アクチュエータ/電動シリンダ » コントローラ/ドライバ
-
・エアシリンダライクの端々制御
・端々+中間12点位置決め
プログラムレスコントローラLECP1、LECP2シリーズは、2025年5月末に
販売中止を予定しています。
置換え品として互換機能を有した単軸コントローラJXC51/61シリーズにて
検討いただけますようお願いいたします。
※LECP1/LECP2モードを使用する際は、最新版のJXC51/61シリーズ
(Ver.3.60~)、ACT Controller2設定ソフトウェア(Ver.1.5.0.0)が必要となります。
▶詳細はこちら
| タイプ | シリーズ | 対応モータ | 電源電圧 | パラレル入出力 入力点数 | パラレル入出力 出力点数 | 位置決め パターン 点数 |
|---|---|---|---|---|---|---|
| プログラムレス タイプ (ストローク学習機能付) | LECP2 | ステップモータ (サーボDC24V) | DC24V ±10% | 6点 (フォトカプラ絶縁) | 6点 (フォトカプラ絶縁) | 端点2点 中間点12点 |
ステップモータコントローラ JXCE□/9□/P□/D1/L□/M1
電動アクチュエータ/電動シリンダ » コントローラ/ドライバ産業用通信機器/無線システム » 産業用通信機器 PROFINET 対応機器
産業用通信機器/無線システム » 産業用通信機器 EtherNet/IP 対応機器
産業用通信機器/無線システム » 産業用通信機器 EtherCAT 対応機器
産業用通信機器/無線システム » 産業用通信機器 DeviceNet 対応機器
産業用通信機器/無線システム » 産業用通信機器 CC-Link 対応機器

-
・EtherCAT、EtherNet/IP™、PROFINET対応、DeviceNet®、IO-Link、CC-Link
・2種類の動作指示方法に対応。
ステップNo.指示運転、数値指示運転
・通信ケーブルの渡り配線が可能。
・数値モニタ対応。
・IO-Link通信が可能。
・安全規格対応品/JXC□F
| シリーズ | 対応モータ | 電源電圧 | フィールドバス |
|---|---|---|---|
| JXCE1(標準仕様) JXCEF(安全規格対応) | ステップモータ (サーボ DC24V) | DC24V ±10% | EtherCAT™ |
| JXC91(標準仕様) JXC9F(安全規格対応) | ステップモータ (サーボ DC24V) | DC24V ±10% | EtherNet/IP™ |
| JXCP1(標準仕様) JXCPF(安全規格対応) | ステップモータ (サーボ DC24V) | DC24V ±10% | PROFINET |
| JXCD1(標準仕様) | ステップモータ (サーボ DC24V) | DC24V ±10% | DeviceNet™ |
| JXCL1(標準仕様) JXCLF(安全規格対応) | ステップモータ (サーボ DC24V) | DC24V ±10% | IO-Link |
| JXCM1(標準仕様) | ステップモータ (サーボ DC24V) | DC24V ±10% | CC-Link |
電動アクチュエータ/ガイド付ロッドタイプ モータストレート形 LEYG□D
電動アクチュエータ/電動シリンダ » ロッドタイプ/ガイド付ロッドタイプ
-
LEYGシリーズ ステップモータ(サーボDC24V)サーボモータ(DC24V)
・ガイドロッドをコンパクトに一体化耐横荷重・高精度回り止めを実現
・先端横荷重:5倍(ロッドタイプ、サイズ25, 100ストロークでの比較)
・すべり軸受、ボールブッシュ軸受に対応
モーメント荷重、ストッパ(すべり軸受)に対応
・速度制御・位置決め:最大64点
・押当て制御の切替可能
ワーク等にロッドを押し当てた状態での保持が可能
・繰返し位置決め精度:±0.02mm以下
LEYシリーズ ACサーボモータ
・高出力モータ(100W/200W)
・高速搬送能力向上
・高加減速度対応(5,000mm/S2)
・パルス入力タイプ
・アブソリュートエンコーダ搭載
・モータレス仕様を用意 詳細は こちら
・対応ドライバ:LECSS-T,LECY□はこちら
| 仕様 | シリーズ | スト ローク (mm) | 押当て推力(N) | 速度 (mm/s) | ねじ リード (mm) |
|---|---|---|---|---|---|
| ステップモータ (サーボ DC24V) | LEYG16D | 30~200 | MAX.141 | MAX.500 | 2.5,5,10 |
| ステップモータ (サーボ DC24V) | LEYG25D | 30~200 | MAX.452 | MAX.500 | 3,6,12 |
| ステップモータ (サーボ DC24V) | LEYG32D | 30~200 | MAX.707 | MAX.500 | 4,8,16 |
| ステップモータ (サーボ DC24V) | LEYG40D | 30~200 | MAX.1058 | MAX.300 | 4,8,16 |
| サーボモータ (DC24V) | LEYG16DA | 30~200 | MAX.111 | MAX.500 | 2.5,5,10 |
| サーボモータ (DC24V) | LEYG25DA | 30~300 | MAX.130 | MAX.500 | 3,6,12 |
| ACサーボモータ | LEYG25DS | 30~300 | MAX.485 | MAX.900 | 3,6,12 |
| ACサーボモータ | LEYG32DS | 30~300 | MAX.736 | MAX.1000 | 4,8,16 |
電動アクチュエータ/高剛性スライダタイプ ボールねじ駆動 LEJS
電動アクチュエータ/電動シリンダ » スライダタイプ
安全上のご注意 電動アクチュエータ/共通注意事項 オートスイッチ/共通注意事項 特長 バリエーション 簡易選定フロー 特定開発品情報 グリーン対応(RoHS) CE,UKCA/UL対応表 システム構成図
| 仕様 | シリーズ | ストローク (mm) | 可搬質量 (kg) 水平 | 速度 (mm/s) | ねじリード (mm) |
|---|---|---|---|---|---|
| ACサーボモータ | LEJS40 | 200~ 1200 | MAX. 55 | MAX. 1800 | 8,16,24 |
| ACサーボモータ | LEJS63 | 300~ 1500 | MAX. 85 | MAX. 1800 | 10,20,30 |
協働ロボット用エアグリッパ JMHZ2-X7400B-DTP/HC10DT/HC10
for 安川電機 MOTOMAN-HC
ロータリアクチュエータ/エアチャック » 協働ロボット用エアグリッパ
-
・Plug and Playですぐ使える
「YASKAWA Plug and Play Kit対応」簡単プログラミング
※適用グリッパ:JMHZ2-X7400B-DTP
・エア駆動により、小形・軽量でも高把持力
・エア供給チューブ1本、電気配線は付属ケーブルを
接続するだけで動作可能
・ソレノイドバルブ、速度調整機構、オートスイッチを一体化
・ガイド一体構造により高剛性・高精度を実現
高精度リニアガイド採用でにより 繰返し精度:±0.01mm
1ランク上のリニアガイドを採用により剛性が向上
・分割式保護カバーによりグリッパのメンテナンスが容易
| タイプ | シリーズ | シリンダ内径(mm) |
|---|---|---|
| 人協慟ロボット用 | JMHZ2-16D-X7400B-DTP JMHZ2-16D-X7400B-HC10DT JMHZ2-16D-X7400B-HC10 | 16 |
ロータリチャック MRHQ
ロータリアクチュエータ/エアチャック » エアチャック(支点開閉形)
-
・チャック機構と揺動機能をコンパクトに一体化。
・搬送ラインのワークの把持・反転が1台で可能。
・揺動範囲および角度の調節が可能。
| タイプ | シリーズ | シリンダ内径(mm) |
|---|---|---|
| 標準 | MRHQ | 10,16,20,25 |
| ダストカバー付 | MRHQ-X11□ | 10,16,20,25 |
3ポジションロータリテーブル MSZ
ロータリアクチュエータ/エアチャック » ロータリアクチュエータ ラックピニオンタイプ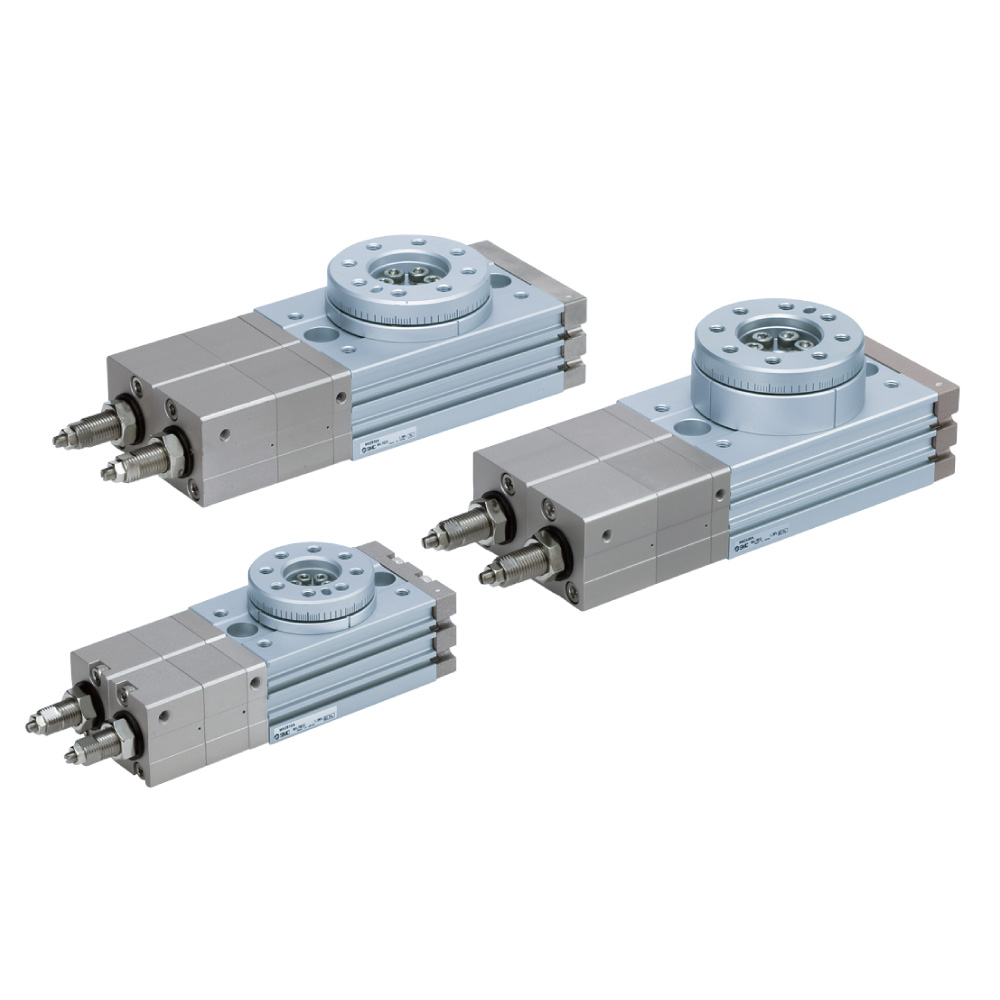
-
・3点停止可能。
・ワークのセンタ左右振り分けなどの用途に対応。
・1台のバルブで動作可能。
| タイプ | シリーズ | ラック形式 | サイズ | 停止位置調整範囲 |
|---|---|---|---|---|
| 高精度形 | MSZA | ダブル | 10,20,30,50 | 中間:±10° 揺動端:中間位置を基準に 左右各0~95° |
| 基本形 | MSZB | ダブル | 10,20,30,50 | 中間:±10° 揺動端:中間位置を基準に 左右各0~95° |
センターロックユニット MA331-X441
エアシリンダ » ピンシフトシリンダアーク溶接工程向機器 » 特殊シリンダ

-
・位置決めピンの装着部(可動部)のセンターロック(位置決め)/フリー(首振り)の切り替え可能
・溶接後のワークひずみがあっても、位置決めピンをフリー状態にすれば、ワークを位置決めピンから容易に抜くことが可能となります。
・位置決めピン揺動角度 3°±1°
| シリーズ | 作動方式 | 操作空気圧力 |
|---|---|---|
| MA331-X441 | 複動 | 0.2〜0.7MPa |

